MIT研发盲眼机器人 可自由通过黑暗危险区域
2018-07-10 | 编辑:中机教育网 | 来源:中国机械工业联合会机经 | 浏览量:
机器人,要还是不要?这个特别的系列探索人类和机器之间不断进化的关系,研究机器人、人工智能和自动化对我们的工作和生活产生的影响。
波士顿动力公司的智能机器人利用的是复杂的计算机视觉,但麻省理工学院的第三代猎豹机器人却采用了与之不同的策略。
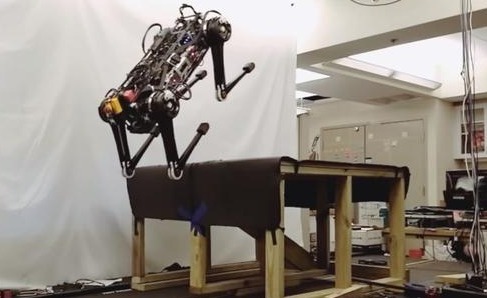
麻省理工学院研发的第三代无视觉猎豹机器人,重达80磅,体型约有一只拉布拉多犬那么大,可以在不使用摄像机或环境传感器的情况下在漆黑的房间里穿行,或者爬上一段有障碍物的楼梯。它依靠的是工程师们所说的“盲眼运动”(blind locomotion)——也就是它的机器人腿的反馈,以及它在黑暗中穿行时所需要的基于算法的平衡感。
麻省理工学院机械工程学副教授Sangbae Kim在今天的新闻发布会上说:“机器人应该能够在不过度依赖视觉系统的情况下处理许多意想不到的行为。”
Kim说:“视觉可能会有噪音,会有些不准确,有时甚至完全不可用。如果太过依赖视觉,机器人必须非常精确地定位,这会导致它行动很慢。因此,我们希望机器人更多地依赖触觉信息。这样,它可以在快速移动的同时处理意外的障碍。”
该策略非常适合机器人在灾难区域或其他危险环境中进行活动。
Kim说:“第三代猎豹机器人的设计目的是做各种各样的任务,这些任务涉及各种各样的地形条件,包括楼梯、路缘和布满障碍物的地面。我认为在非常多的场合中,我们会想让机器人代替人类去完成简单的任务。通过远程控制机器人去更安全地完成危险、肮脏和困难的工作。”
Kim的团队为无视觉系统的猎豹机器人开发了两种新型算法。
接触检测算法帮助机器人确定在腿的摆动与踩地之间转换的最佳时间点,这取决于它在触地时感受到的障碍物。该算法基于来自陀螺仪、加速度计和腿部关节位置的数据来计算这些概率。
Kim解释说:“如果人类闭上眼睛向前迈出一步,我们会对地面可能在哪里有一个心理模型,并且可以为此做好准备。但我们同时也依赖于触摸地面的感觉。对第三代猎豹机器人我们做的是类似的事情,将多个来源的信息结合起来,以确定切换的时间。”
研究人员在实验中测试了该算法:让第三代猎豹机器人在实验室的跑步机上小跑,以及爬楼梯。两个表面都随意散落着一些物体,例如木块和胶带卷。
与此同时,一种模型预测控制算法,就是当任何一只腿接触到地面并施加了特定大小的力,模型预测控制算法会马上计算在未来的半秒内,机器人的身体和腿应该处于什么位置。
Kim说:“比方说加入有人从侧边踢了机器人一脚,当机器人的脚已经接触到地面时,算法就要决定‘我该如何确定脚要施加的力?因为左边有一个阻碍我的速度,所以我得对相反的方向施加一个力来消灭那个速度。如果我向相反方向施加100牛顿的力,那么半秒后会发生什么?’”
预测算法每一秒计算20次。为了测试其性能,在实验中,研究人员在机器人在跑步机上或是上楼时,用脚踢和用力拉扯机器人,然后相应地调整算法。(我们希望第三代猎豹机器人不要对此怀恨在心)。
最终,Kim和他的同事们将在现有基础上增加计算机视觉系统,但对于第三代猎豹机器人来说,他们首先想要做的是盲眼运动。
一个能在黑暗中行走、奔跑或攀登,速度还肯定比人类要快得多的机器人?这正是你在地震后想要看到的东西——而这恰好也是你在机器人起义后不想看到的东西。
在今年10月举行的智能机器人与系统国际会议上,无视觉技术以及其他对猎豹机器人模型的改进将成为本次会议的主题。这项研究得到了Naver、丰田研究机构、富士康和美国空军科学研究办公室的支持。
上一篇 上一篇:深度剖析工业机器人用精密减速器技术
下一篇 下一篇:美研究人员公布“盲动”机器人技术细节