3D打印用于水下探索的智能机器人鱼
2018-09-03 | 编辑:中机教育网 | 来源:中国机械工业联合会机经 | 浏览量:
8月29日,从外媒获悉,来自土耳其菲拉特大学的一组工程研究人员正在使用仿生设计和3D打印来构建智能机器人鱼,用于实际的探索和测量任务。这些类型的机器人是水下探索,观察和研究目的的首选,特别是在需要机动性的情况下。
3D打印的尾鳍
该团队发表了他们的论文,题为“Mechatronic Design and Manufacturing of the Intelligent Robotic Fish for Bio-Inspired Swimming Modes”,由Mustafa Ay,Deniz Korkmaz,Gonca Ozmen Koca,Cafer Bal,Zuhtu Hakan Akpolat和Mustafa Can撰写。
本文介绍了具有双连杆推进尾机构的仿生Carangiform型自主机器鱼原型(i-RoF)。对于设计过程,采用多链接仿生方法,其使用真实鲤鱼的物理特征作为其大小和结构。根据游泳模式和鲤鱼的尾部振荡确定适当的体率。机器人鱼的特征是在实验池中进行前进,转弯,上下和自主游泳运动。机器人鱼拥有优异的游泳性能。
“机器鱼设计有两种基本方法,”研究人员写道。 “首先是仿生设计,它具有一定的要求,如尾部的大小和关节数量,以提供身体行波,并能够控制重心保持在一定深度。第二种设计方法使用只有鱼的运动效果,但它并没有真正受到真鱼的启发。“
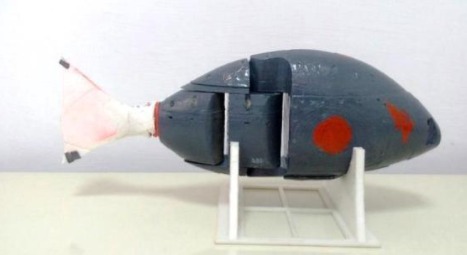
他们的机器鱼模仿BCF型Carangiform游泳模式,其推进尾翼机构由伺服电机驱动。机器人鱼原型由五个基本部件组成,包括前刚性主体,双连杆尾机构,执行中央模式发生器(CPG)模型的控制单元,前视单元和柔性尾鳍。前部刚性鱼雷形主体设计用于容纳电子设备,传感器和重心(CoG)控制机构。 CoG控制机制成功地提供了上下运动能力。基于CPG的运动控制器适于产生健壮,平滑和有节奏的振荡游泳模式。由高功率伺服电机驱动的尾部连杆和一个固定在脚蹬上的柔性尾鳍设计用于产生原型的体波。这些链条以串联链结构的形式相互连接,产生游泳运动所需的推力。由于机器人鱼在水中移动时应该能够感知环境中的静态和/或动态障碍,因此该团队在机器人鱼的左侧,右侧和前方放置了三个夏普红外距离传感器。
机器人鱼的3D模型是在SolidWorks中设计的。 然后在Voxelizer中将STL文件转换为体素格式,其中配置了图层,打印和支持点设置。 原型的每个部分都是用PLA线材3D打印的,柔性尾鳍是用模具硅胶制作的。 外尾鳍模具也采用3D打印技术设计和生产。 所有部件都覆盖有环氧树脂,以防止可能从生产过程中形成的微孔泄漏。 在组装阶段之后,外表面覆盖有合成涂料,以防止在组装期间可能由毛细管裂缝引起的泄漏。
机器鱼原型长约500毫米,宽76毫米,高215毫米。原型质量约为3.1千克。
“在真实的实验系统中研究了用于三维运动能力的机器鱼原型。在这些分析中,进行了超过72个不同的实验研究以获得原型的特征,”研究人员解释说。 “为了测试安装部件的密封性能,它们在充满水的测试池中运行6小时。观察到密封测试的成功。”
在未来的工作中,将使用不同的控制结构检查原型的闭环控制性能,并在不同的水道中测试机器人的游泳性能。
这种机器鱼设计为各种不同的海洋应用提供了多种解决方案,例如水下资源检查,污染测定,生物形态观察,淹没区域调查,电力或石油管道故障检测,海岸线安全和军事任务。
上一篇 上一篇:新型纳米铝合金产品成功应用电网建设
下一篇 下一篇:中国重汽承担的又一项国家科技重大专项课题通过技术验收